■ヒダピオ学習回路を使ったモータ制御
ここでは、モータを正転、反転させるUSB-IOモータ制御回路について紹介します。
◆回路図
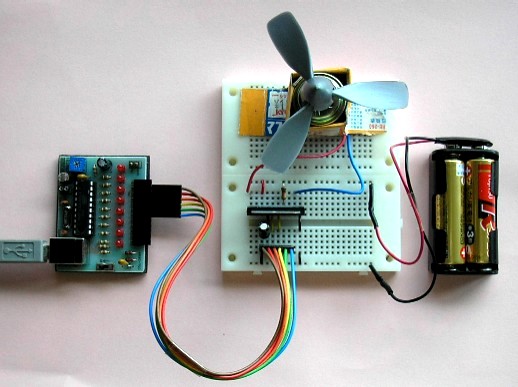
◆実体図
●ヒダピオ学習回路
●プリント基板版ヒダピオ学習回路
HIDaspxの「+」印とブレッドボード赤のジャンパー線を目安に接続する。
◆動作確認
「ヒダピオ」の「基礎実験」を使って、ポートB6、B7をonにして、モータの回転がどうなるかを確かめる。
B6ポート B7ポート 動き off off ストップ on off 正転 off on 逆転 on on ブレーキ

■モータドライバIC TA7291P について
ここでは入手しやすく、ブレッドボードでも使いやすい モータドライバIC TA7291P を使用する。
これを使うと、1.5〜20Vの範囲のモータを、ストップ、正転、反転、ブレーキおよび回転数の変更が可能となる。
|
■モータの回転数を制御
◆方法
●PWM:制御端子の単位時間におけるOn:Off時間比でモーターの回転数を決めるモード
●REF:Vref にかかる電圧がモーターの回転数を決めるモード。
◆PWMで回転数を落とす
●PWMとは
・スイッチon/offの比率(デューティー比という)を変化させる手法。
・Pulse Width Modulationの略、パルス幅変調(パルスはばへんちょう)の意。
◆「JA制御ヒダピオ」でのプログラム例
| 普通のプログラム | サブルーチンを使ったプログラム |
|
|